һ��ǰ��
���M늙C�nj���}�_��̖�D׃���λ�ƻ�λ�Ƶ��_�h����Ԫ�����ڷdz��d����r�£�늙C���D�١�ֹͣ��λ��ֻȡ�Q���}�_��̖���l�ʺ��}�_����������ؓ�d׃����Ӱ푣����o늙C��һ���}�_��̖��늙C�t�D�^һ������ǡ��@һ�����Pϵ�Ĵ��ڣ����ϲ��M늙Cֻ�������Ե��`����o�۷e�`������c��ʹ�����ٶȡ�λ�õȿ����I���ò��M늙C������׃�÷dz��ĺ��Ρ�
�mȻ���M늙C�ѱ��V���ؑ��ã������M늙C����������ͨ��ֱ��늙C������늙C�ڳ�Ҏ��ʹ�á����M늙C������}�_��̖���������·�ȽM�ɿ���ϵ�y����ʹ�á�����úò��M늙C�������£����漰���Cе��늙C����Ӽ�Ӌ��C���S�����I֪�R��
Ŀǰ,���a���M늙C�ďS�ҵĴ_���٣������Ќ��I���g�ˆT���܉������_�l�����ƵďS�҅s�dz��٣��ֵďS��̎��һ�NäĿ�ķ����A�Σ��@�ͽo�Ñ��ڮaƷ�x�͡�ʹ��������S���韩���b��������r���҂��ڴ˔������M늙C�Ļ�������ԭ�������܌��V���Ñ����x�͡�ʹ�á������C���M�r����������
|
��������ʽ��PM�ͣ����M늙Cԭ��
|
����ʽ��PM�ͣ����M늙C��������С��������,�ӑB���ܺõ����c;Ŀǰʹ�õĔ�����HB�͵�3�����ϣ���ʹ�������������ӵ�څ�ݣ��������һ����^��
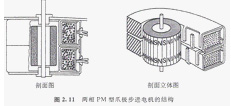
����ʽ��PM�ͣ����M늙C�D�Ӟ���D����(�ⲿ�鶨�ӣ����g���϶��늙C)���A�����D�ӵ������ֲ�n��s�O(�����o�X)�� ����PM��צ�O���M늙C�ĽY����D2��11��ʾ���������@�M���S����ã��@�N���@�M���b��ʽ�Q��Č��ͽY����
�D�Ӟ�A�������ô��F�������İ��b��ݔ���S���A�������ô��F�ĈA������潻��ֲ���n�O��s�O���O������nr��n��s�O�ȘO�ࡣ���D�ӴŘOͨ�^��϶���������ӴŘO�����ӴŘO�����Π�Q��צ�O(clawpo1e)���Ì���䓰�_�����ͣ��γ�nr��צ�O���ɂ����ӘO����ŘO�������ţ����1��2�O�࣮��2nr���c�D�ӴŘO��2nr���������γ�һ�ඨ�ӡ�
�������@�M�@�ڈA�ιǼ��ϣ��@�Ƴɭh�Ȧ�������ϵăɹ����Ӵ�·��ͬ���������ŘO���1��4�O�࣬��ƫ��90/nr�����D�ӴŘO����һ�¡�
���Ӟ�צ�O�͵IJ��M늙C����϶��o��2mm, �Q������ǵķֱ��ʦ�s=90��nr����nr=5��12���t����Ǧ�s��1��8��7 5��ͨ��ʹ��7��5�� �D2.12��ʾ��PM�Ͳ��M늙C�����^��
����PM��צ�O���M늙C�Ĺ���ԭ��Ҋ�D2.14�����H�ă���PM��צ�O���M늙C��D2.11��ʾ���OӋ�Ķ��Onr=12���˕r���ӵ�צ�O��ÿ����12���O���麆��ԭ���������⣬�D2��14��һ�ຆ����һ���O�����ȈD2.11�͈D2��14�����H�ă��ಽ�M늙C�����@�Mͬ�r���ţ�ͨ����2�༤���ӣ����f�����������ף�������һ�༤�Š�B���f����һ�༤���������D�����D�����༤�ſ϶�Ҳ���\�D��
��D2��14��ʾ��stl��st2�鶨�ӵă����@�M������Ȧ��D��ʾ�����@�ơ�rt���D�ӣ������S�F����F���ɣ�n��s�O�ֲ����D������棬�c���ӘO֮�g�γɹ�����϶���ɈD֪����һ�ྀȦ����һ�����ӴŘO���D�ӘO�����c���ӘO�����Ĺ�����ͬ�������D�ӵ�s�O�cn�O�ض���������a��늴�����
��һ�����D2��14(a)��l�ྀȦ���ňD���D���c����stl�ĴŘO���ஐ������������˕rʩ���������D�ӕ�����ؓ�d�Ƅӣ�늴������a���D2��14(a)��ʾλ�õĻ֏�����ؓ�d���Ĵ�С�Q����λ�þ��ȡ��˕r��2�ඨ��st2�ĴŘO���ľ����D�ӴŘOn��s�O�����gλ�ã�2�ඨ���c�D�ӴŘO���ľ����У�2����λ�ƽǞ�һ������ǡ�
�ڶ������D2��14(b)�У�stl�ľ�Ȧ�����off��st2�ľ�Ȧ���׃��on���D�������ƄӦУ�2���D�ӱ�st2������ֹͣ��
���������D2��14(c)�У�stl�ľ�Ȧ�������ͨ늣����ӘO�Է��D���D�������D�У�2���oֹ��
���IJ����D2 14(d)�У�st2�ľ�Ȧ�������ͨ늣����ӘO�Է��D���D�������D�У�2���oֹ��
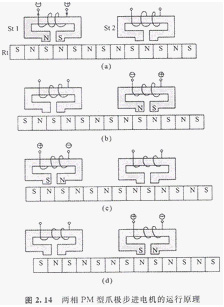
�ٷ��؈D2��14(a)������(b)��(c)��(d)����ѭ�h���������D�����Ϟ����PM��צ�O���M늙C���\��ԭ����
�������ϔ���,һ��������D�ӴŘO�O���l��2����4����һ��ѭ�h����������D�ӵĘO����Q�������ӵĘO�����D�ص�������Ӱ푡���Ȼ�����Ͳ��M늙C�ІΘO(uni-polar)�ͺ��p�O(b1һpolar)�ͣ������S���ӴŘO�Ż������D�����D����ͬ��
��������ʽ��VR��)���M늙Cԭ��
1���Y����
늙C�D�Ӿ���ֲ����ܶ�С�X�������X����������@�裬����S�����ηքe�c�D���X�S���e�_��
0��1/3�ơ�2/3��,���������D���X�S���g�ľ��x���X���ԤƱ�ʾ������A�c�X1�����R��B�c�X2�����e�_1/3�ƣ�C�c�X3�����e�_2/3�ƣ�A���c�X5�����R����A������A���X5�����X1�������Ƕ��D�ӵ�չ�_�D��
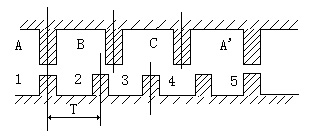
2�����D��
��A��ͨ늣�B��C�ͨ늕r�����ڴň����ã��X1�cA���R�����D�Ӳ����κ������¾�ͬ����
��B��ͨ늣�A��C�ͨ늕r���X2���cB���R���˕r�D���������^1/3�ƣ��˕r�X3�cCƫ�ƞ�1/3�ƣ��X4�cAƫ�ƣ���-1/3�ƣ�=2/3�ơ�
��C��ͨ늣�A��B�ͨ늣��X3���cC���R���˕r�D�����������^1/3�ƣ��˕r�X4�cAƫ�ƞ�1/3�ƌ��R��
��A��ͨ늣�B��C�ͨ늣��X4�cA���R���D�����������^1/3�ƣ��@�ӽ��^A��B��C��A�քeͨ늠�B���X4�����X1ǰһ�X���Ƶ�A�࣬늙C�D�������D�^һ���X�࣬�������ذ�A��B��C��A����ͨ늣�늙C��ÿ����ÿ�}�_��1/3��,�������D���簴A��C��B��A����ͨ늣�늙C�ͷ��D��
�ɴ˿�Ҋ��늙C��λ�ú��ٶ��Ɍ�늴Δ����}�_�������l�ʳ�һһ�����Pϵ���������Ɍ�����Q����
���^�����ڌ����ء�ƽ�����������p�ٽǶȵȷ��濼�]����������A-AB-B-BC��C-CA-A�@�N��늠�B���@�ӌ�ԭ��ÿ��1/3�Ƹ�׃��1/6�ơ�������ͨ�^���������ͬ�ĽM�ϣ�ʹ��1/3��׃��1/12�ƣ�1/24�ƣ��@����늙C�����ӵĻ�����Փ������
���y�Ƴ���늙C��������m������@�裬���S���քe�c�D���X�S��ƫ��1/m,2/m����(m-1)/m,1�����Ҍ�늰�һ��������늙C���������D�����ơ����@�Dz��M늙C���D������l����ֻҪ�����@һ�l���҂���Փ�Ͽ��������κ���IJ��M늙C�����ڳɱ��ȶ�濼�]���Ј���һ���Զ��������ġ�������ࡣ
3�����أ�
늙Cһ��ͨ늣��ڶ��D���g���a���ň�����ͨ���������D���c�����e�_һ���ǶȮa����
F�c��d��/d�ȣ�������
���ͨ����=Br*S
Br����ܣ�S�錧����e
F�cL*D*Br������
L���Fо��Ч�L�ȣ�D���D��ֱ��
Br=N��I/R
N��I�����@�谲�є���������є���R����衣
����=��*�돽
�����c늙C��Ч�w�e*���є�*���ܳ����ȣ�ֻ���]���Ԡ�B��
��ˣ�늙C��Ч�w�eԽ��Ű��є�Խ���D���g��϶ԽС��늙C����Խ��֮��Ȼ��
�ġ����ʽ��HB�ͣ����M늙Cԭ��
1������ʽ���M늙C�ĽY��
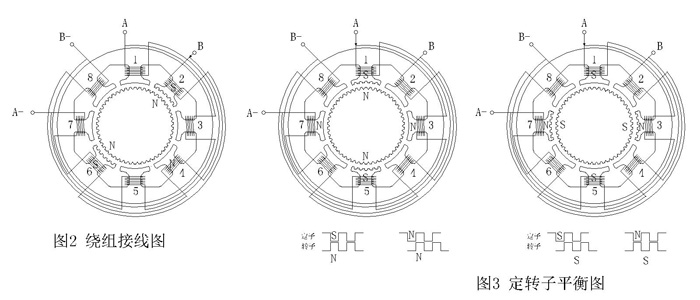
���I�����в�����D4.1��ʾ�Ķ��ӴŘO�ώ���С�X���D���X���ܶ�ĽY�����䲽��ǿ������ú�С����D4.1������ʽ���M늄әC�ĽY���D���͈D4.2���M늙C�@�M�Ӿ��D��A��B�����@�M�؏�����࣬�������ӈA����8�����ĴŘO��1��3��5��7�ŘO����A���@�M��2��4��6��8�ŘO����B���@�M������ÿ���O������5���X���O�����п����@�M���D���ɭh�δ�䓺̓ɶ��Fо�M�ɣ��h�δ�����D���в����S���ţ��ɶ��Fо�քe�b�ڴ�䓵ăɶˣ�ʹ���D���S��֞�ɂ��ŘO���D���Fо�Ͼ���ֲ�50���X���ɶ��Fо�ϵ�С�X��e�_�낀�X�࣬���D�ӵ��X����X����ͬ��
2������ʽ���M늙C�Ĺ���ԭ��
����������@�M��  �Ĵ���݆��ͨ늣�ÿ��ֻ��һ���@�Mͨ늣����Ę���һ��ѭ�h���������@�M�����ͨ�^�r����a���ńӄݣ����c���ô�䓮a���Ĵńӄ�����ã��a��늴��D�أ�ʹ�D�Ӯa�����M�\�ӡ�
��A���@�Mͨ늕r�����D��N�O�˴ŘO1�ϵ��@�M�a����S�ŘO�����D��N�O��ʹ�ôŘO1�����X���X�����������D��N�Oָ��ŘO1���X�棬�ŘO5��Ҳ���X���X���ŘO3��7���X���ۣ���D4.4��ʾA��ͨ��D��N�O�˶��D��ƽ��D�����ڃɶ��D���Fо�ϵ�С�X��e�_�낀�X�࣬���D��S�O�ˣ��ŘO1����5���a����S�O�ň����ų��D��S�O���c�D���������X���ۣ��ŘO3����7���X��a��N�O�ň��������D��S�O��ʹ���X���X��A���@�Mͨ늕r�D��N�O�ˡ�S�O���D��ƽ��D��D4.3��
���D���Ϲ���50���X�����X��Ǟ�360��/50=7.2�㣬����ÿ���O����ռ���X���鲻����������ˮ����ӵ�A��ͨ늣����D��N�O���ŘO1��5���X�c�D���X���X����߅��B���@�M�ĴŘO2��5���X���D���X��1/4�X����eλ����1.8�㣬��D4.4��ʾA��ͨ늕r���D���Xչ�_�D���AȦ�ĵط���A��ŘO3���X���D�Ӿ͕��eλ3.6�㣬���F�X�����ˡ������������D��N�ˡ�A��1��S�ŘO�����ŭh��A��3����N�ŘO���D��S�ˡ��D��N�ˣ���һ�]����������A�����B��ͨ늕r���ŘO2�a��N�O�ԣ������x�������S�O�D��7�X��ʹ���D����형rᘷ����D��1.8�㣬���F�ŘO2���D���X���X��B���@�Mͨ늶��D���Xչ�_�D��D4.5��ʾ���˕r�ŘO3���D���X��1/4�X����eλ������������^�m�����ĵ����ͨ늣��D�ӾͰ�형rᘷ���һ��һ�����D�ӣ�ÿͨ�һ�μ�ÿ��һ���}�_�D���D�^1.8�㣬���Q����Ǟ�1.8�㣬�D���D�^һȦ��360��/1.8��=200���}�_��Ҋ�D4.4��4.5����
���D��S�O��Ҳ��ͬ�ӵ��������@�M�X���X�r������߅һ��ŘO�eλ1.8�㡣
|

 �Ԓ��ԃ
�Ԓ��ԃ